|
伺服電機及其驅(qū)動技術(shù)在我國還屬于技術(shù)含量較高的領(lǐng)域,在機床、工業(yè)機器人、印刷機械、包裝機械、塑料機械和紡織機械等行業(yè)得到廣泛的應(yīng)用。一個伺服系統(tǒng)的構(gòu)成通常包含被控對象(plant)、執(zhí)行器(actuator)、控制器(controller)等幾個部分,機械手臂、機械工作平臺通常作為被控對象。執(zhí)行器的功能在于主要提供被控對象的動力,可能以氣壓、油壓、或是電力驅(qū)動的方式呈現(xiàn),若是采用油壓驅(qū)動方式,一般稱之為油壓伺服系統(tǒng)。目前絕大多數(shù)的伺服系統(tǒng)采用電力驅(qū)動方式,執(zhí)行器包含了電機與功率放大器,特別設(shè)計應(yīng)用于伺服系統(tǒng)的電機稱之為伺服電機(servo motor),通常內(nèi)含位置反饋裝置,如光電編碼器(optical
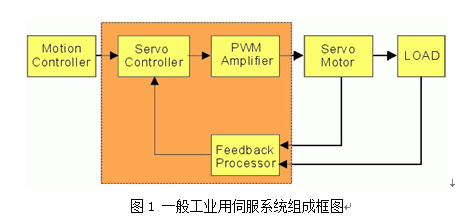
encoder)、解角器(resolver),目前主要應(yīng)用于工業(yè)界的伺服電機包括直流伺服電機、永磁交流伺服電機、與感應(yīng)交流伺服電機,其中又以永磁交流伺服電機占絕大多數(shù)。控制器的功能在于提供整個伺服系統(tǒng)的閉路控制,如扭矩控制、速度控制與位置控制等。目前一般工業(yè)用伺服驅(qū)動器(servo drive)通常包含了控制器與功率放大器。圖1所示為一般工業(yè)用伺服系統(tǒng)組成框圖。本文分析一般工業(yè)用伺服系統(tǒng)的伺服性能及闡述如何對一個既定的伺服系統(tǒng)進行調(diào)整,使之達到最佳的伺服性能。
一、伺服系統(tǒng)的性能分析
衡量一個伺服系統(tǒng)的性能主要從以下四個方面來分析:響應(yīng)速度、剛度、穩(wěn)定性以及抗噪音能力。
·響應(yīng)速度
伺服系統(tǒng)的響應(yīng)速度描述了系統(tǒng)響應(yīng)指令給定的快慢程度,對大部分的伺服系統(tǒng)來說追求較快的響應(yīng)速度,系統(tǒng)的增益越大,則響應(yīng)速度快,有助于提高系統(tǒng)的性能;
·剛度
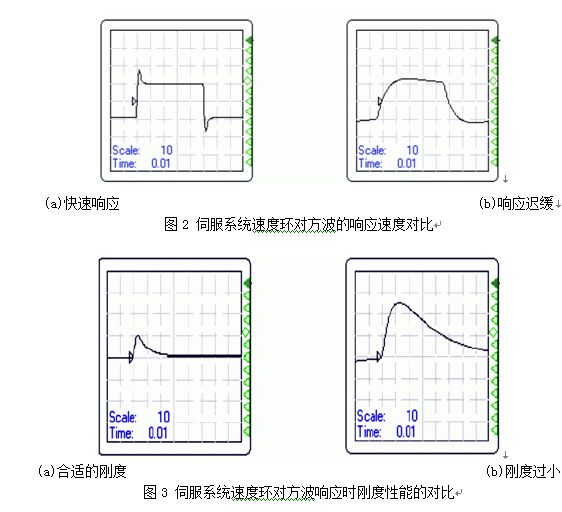
伺服系統(tǒng)的剛度描述了系統(tǒng)抗扭矩干擾的能力,系統(tǒng)的剛度比較難于衡量,這是由于系統(tǒng)的干擾往往難于量化,對于一個伺服系統(tǒng)來說,高的剛度能夠達到較好的伺服性能;
·穩(wěn)定性
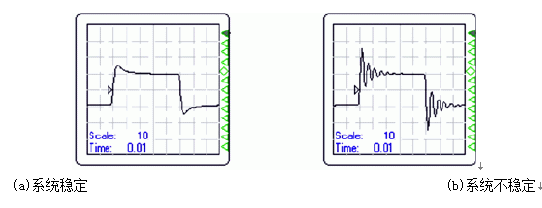
伺服系統(tǒng)的穩(wěn)定性描述了系統(tǒng)消除自振蕩的裕量,任何一個系統(tǒng)都必須有合適的穩(wěn)定裕量,伺服系統(tǒng)的穩(wěn)定性一般通過對方波信號響應(yīng)的過沖量和振蕩次數(shù)來衡量,伺服增益越高,系統(tǒng)的穩(wěn)定性將降低;
·抗噪音能力
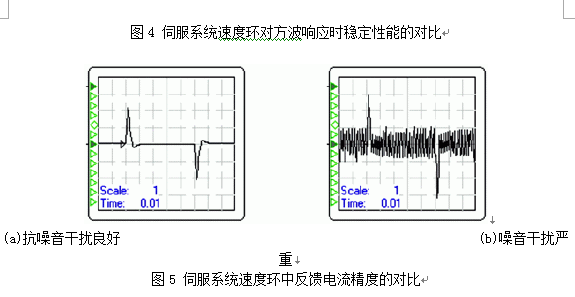
伺服系統(tǒng)的抗噪音能力描述了系統(tǒng)對噪音源的放大程度,噪音干擾會導(dǎo)致系統(tǒng)發(fā)熱、振蕩,扭矩波動和雜音等不良現(xiàn)象。伺服增益越高,系統(tǒng)的抗噪音能力將越低。圖2~圖5所示為伺服系統(tǒng)性能的對比分析。
二、伺服系統(tǒng)的調(diào)整過程研究
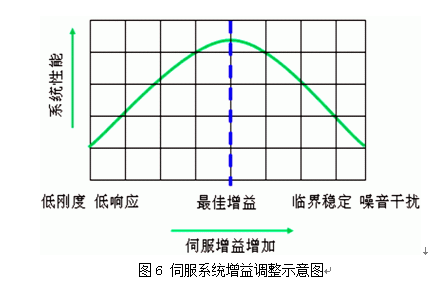
伺服系統(tǒng)的調(diào)整主要是系統(tǒng)的各項控制增益的調(diào)整,通過上述的分析,當增益調(diào)整較高時,可以使得系統(tǒng)具有較快的響應(yīng)速度,提高系統(tǒng)的剛度從而提高系統(tǒng)抗扭矩干擾的能力。然而,另一個方面,過高的增益將使得系統(tǒng)的穩(wěn)定性和抗噪音能力下降。因此,伺服系統(tǒng)的調(diào)整實際上是一個尋求系統(tǒng)各項性能的相互平衡并使整體性能最優(yōu)的決策過程。本節(jié)中,以伺服系統(tǒng)速度環(huán)的調(diào)整為例,研究其調(diào)整過程,分析如何通過調(diào)整伺服系統(tǒng)的增益來最優(yōu)化系統(tǒng)的響應(yīng)速度、剛度、穩(wěn)定性以及抗噪音能力,從而得到系統(tǒng)的最佳性能。圖6所示為伺服系統(tǒng)增益調(diào)整示意圖。
1. 伺服系統(tǒng)的速度環(huán)基本組成
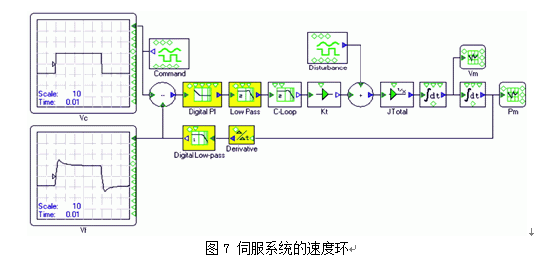
伺服系統(tǒng)的調(diào)整過程中,速度環(huán)是最難調(diào)整的,一般伺服系統(tǒng)的速度環(huán)如圖7所示。速度指令來自于位置環(huán),在調(diào)整過程中,通常以方波信號作為響應(yīng)信號,這是由于方波信號的響應(yīng)對系統(tǒng)要求最為嚴格。反饋速度與指令速度通過比較環(huán)節(jié)進行比較得到速度誤差,一般來說速度環(huán)的控制作用就是為了減小這種誤差。比例積分(PI)控制器中的比例增益通常是在高頻時起作用,而積分增益通常是在中頻時起作用,速度誤差經(jīng)過比例積分控制器后其輸出為電流指令。伺服系統(tǒng)的電流環(huán)在研究速度環(huán)的時候,通常把它當作速度環(huán)的一個環(huán)節(jié),它的作用就是把電流指令轉(zhuǎn)換成實際電流,此時有可能引起系統(tǒng)的穩(wěn)定性問題。
電機也作為速度環(huán)中的一個環(huán)節(jié)來研究,此時電機模型可以簡化為KT/JTOTAL,其中KT把電流環(huán)輸出的實際電流轉(zhuǎn)換為扭矩信號,1/JTOTAL再把扭矩信號轉(zhuǎn)換為系統(tǒng)的加速度信號。系統(tǒng)的加速度經(jīng)過積分作用得到速度信號,速度信號再次經(jīng)過積分環(huán)節(jié)得到系統(tǒng)的位置信號。系統(tǒng)的位置信號通過位置傳感器來檢測,系統(tǒng)的速度正比于系統(tǒng)位置的變化率。為了提高伺服系統(tǒng)的抗噪音能力以及穩(wěn)定性,通常在系統(tǒng)中加入濾波器,如圖7所示。
2. 伺服系統(tǒng)的調(diào)整過程研究
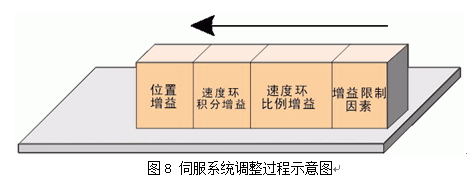
伺服系統(tǒng)的調(diào)整主要是針對閉環(huán)控制器的增益進行調(diào)整,使得整個系統(tǒng)達到一個最優(yōu)的工作狀態(tài)。其中速度環(huán)的調(diào)整是整個系統(tǒng)調(diào)整中最關(guān)鍵的,也是最難調(diào)整的。通常,增益的調(diào)整是一個一個地調(diào)整,首先了解伺服增益的限制因素,然后調(diào)整速度環(huán)的比例增益,接下來調(diào)整速度環(huán)的積分增益。對于每個增益參數(shù)的調(diào)整,都是從低慢慢地增加,確保系統(tǒng)穩(wěn)定。
伺服系統(tǒng)比例增益的上限通常是由系統(tǒng)內(nèi)部的各個部件本身決定的,驅(qū)動器本身的采樣速率、濾波器特性、電流環(huán)特性甚至是接線產(chǎn)生的噪音,這些都可能成為限制比例增益的過高調(diào)整。同時伺服系統(tǒng)的反饋環(huán)節(jié)和機械傳動部件也可能成為限制系統(tǒng)比例增益的重要因素。圖8為伺服系統(tǒng)調(diào)整過程示意圖,圖9為系統(tǒng)調(diào)整試驗裝置。

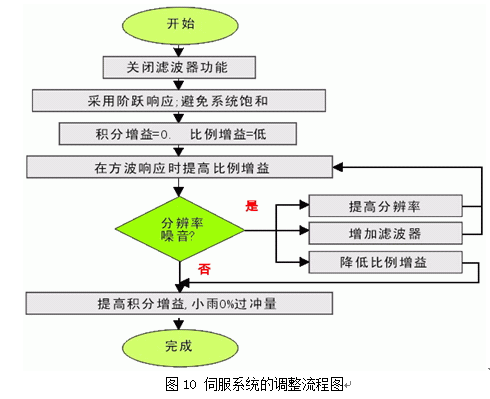
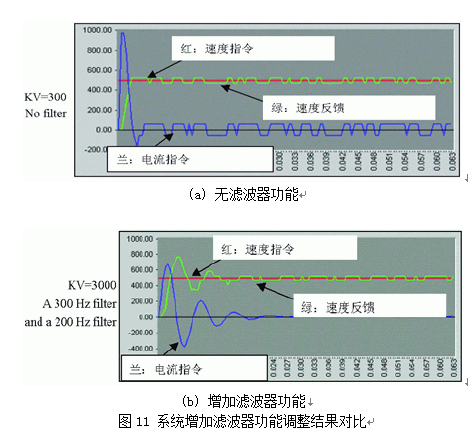
伺服系統(tǒng)的調(diào)整過程可以用如圖10所示的流程圖。事先假定系統(tǒng)伺服增益的限定因素是固定的,然后積分增益設(shè)為0,比例增益從低以20%的增量慢慢往上調(diào)整,同時監(jiān)測系統(tǒng)的穩(wěn)定性,當系統(tǒng)產(chǎn)生過沖,返回到上一個設(shè)置值。如果系統(tǒng)有噪音干擾,可以通過增加濾波器功能、提高反饋環(huán)節(jié)的分辨率或適當降低控制器的比例增益。增加濾波器功能有助于提高系統(tǒng)的抗噪音能力和響應(yīng)能力,但是也同時給系統(tǒng)帶來了時延的問題,而導(dǎo)致系統(tǒng)不穩(wěn)定,因此只有在必要的情況下才增加濾波器功能。圖11為系統(tǒng)增加濾波器功能調(diào)整結(jié)果。
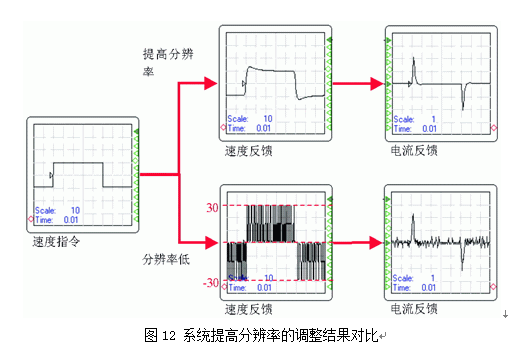
反饋環(huán)節(jié)的分辨率包括位置分辨率和速度分辨率,位置分辨率是位置傳感器檢測位置信號的最小增量值。速度分辨率可以表示為VRESOLUTION= PRESOLUTION /TSAMPLE。比如,一個伺服系統(tǒng)的位置傳感器采用2000PPR的編碼器,采樣頻率FSAMPLE為4kHz,則系統(tǒng)的位置分辨率為8000CPR,速度分辨率為30r/min。圖12所示為系統(tǒng)提高分辨率的調(diào)整結(jié)果。
|
